


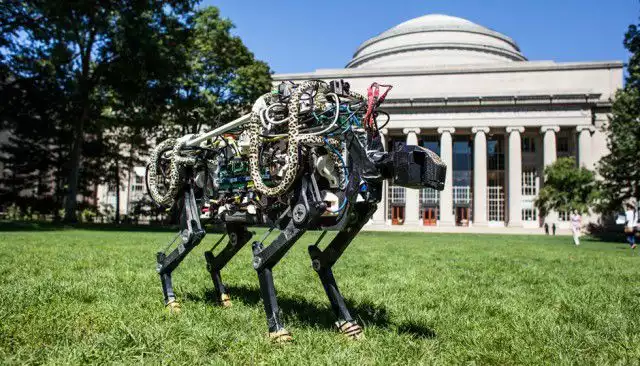
Cela fait plusieurs années que le MIT développe Cheetah, un robot à quatre pattes rapide qui gagne désormais en autonomie puisque les ingénieurs sont désormais fiers d'annoncer avoir coupé le cordon qui le reliait encore à un module d'alimentation, de contrôle et de sécurité.

Cheetah est entièrement alimenté par des batteries, contrairement à certains autres projets, dont Wild Cat de la DARPA, qui utilise un moteur thermique. " Notre robot peut être aussi silencieux et efficace que les animaux, le seul bruit que l'on entend de lui sont le bruit de ses pattes qui touchent le sol."
Le projet du MIT était de se rapprocher le plus possible de la façon dont se déplace le guépard. L'approche des ingénieurs était de proposer un système efficace, silencieux et avec un rendement plus important que les robots misant sur des systèmes hydrauliques associés à des moteurs à explosion.
Grâce à des pattes évoluées, Cheetah exerce la pression au sol idéale à chaque moment, pour optimiser son " temps de vol " entre chaque foulée, lui permettant d'atteindre une vitesse maximale avec très peu d'efforts.

